假设z轴向屏幕内,从a1旋转到a2,绕z轴的旋转矩阵推导(不考虑旋转正方向):
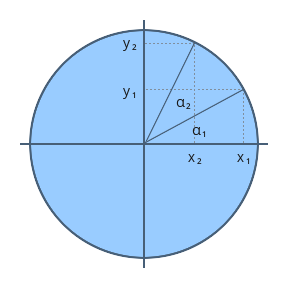
x1=cos(a1)y1=sin(a1)x2=cos(a1+a2)y2=sin(a1+a2)
和角公式:
cos(α+β)=cos α⋅cos β−sin α⋅sin βsin(α+β)=sin α⋅cos β+cos α⋅sin β
代入可得:
x2=cos(a1+a2)=cos a1⋅cos a2−sin a1⋅sin a2=x1⋅cos a2−y1⋅sin a2y2=sin(a1+a2)=sin a1⋅cos a2+cos a1⋅sin a2=y1⋅cos a2+x1⋅sin a2
逆推出z轴的旋转矩阵:
⎣⎢⎢⎡cos asin a00−sin acos a0000100001⎦⎥⎥⎤⎣⎢⎢⎡xyz1⎦⎥⎥⎤=⎣⎢⎢⎡x⋅cos a−y⋅sin ax⋅sin a+y⋅cos az1⎦⎥⎥⎤
同理可推导绕y轴和x轴的旋转矩阵(不考虑旋转正方向):
⎣⎢⎢⎡cos a0sin a00100−sin a0cos a00001⎦⎥⎥⎤⎣⎢⎢⎡xyz1⎦⎥⎥⎤=⎣⎢⎢⎡x⋅cos a−z⋅sin ayx⋅sin a+z⋅cos a1⎦⎥⎥⎤
⎣⎢⎢⎡10000cos asin a00−sin acos a00001⎦⎥⎥⎤⎣⎢⎢⎡xyz1⎦⎥⎥⎤=⎣⎢⎢⎡xy⋅cos a−z⋅sin ay⋅sin a+z⋅cos a1⎦⎥⎥⎤